| Date | May 2019 | Marks available | 6 | Reference code | 19M.1.AHL.TZ1.H_5 |
| Level | Additional Higher Level | Paper | Paper 1 (without calculator) | Time zone | Time zone 1 |
| Command term | Find | Question number | H_5 | Adapted from | N/A |
Question
A camera at point C is 3 m from the edge of a straight section of road as shown in the following diagram. The camera detects a car travelling along the road at = 0. It then rotates, always pointing at the car, until the car passes O, the point on the edge of the road closest to the camera.

A car travels along the road at a speed of 24 ms−1. Let the position of the car be X and let OĈX = θ.
Find , the rate of rotation of the camera, in radians per second, at the instant the car passes the point O .
Markscheme
* This question is from an exam for a previous syllabus, and may contain minor differences in marking or structure.
let OX =
METHOD 1
(or −24) (A1)
(M1)
A1
EITHER
A1
attempt to substitute for into their differential equation M1
OR
A1
attempt to substitute for into their differential equation M1
THEN
(rad s−1) A1
Note: Accept −8 rad s−1.
METHOD 2
(or −24) (A1)
A1
attempt to differentiate implicitly with respect to M1
A1
attempt to substitute for into their differential equation M1
(rad s−1) A1
Note: Accept −8 rad s−1.
Note: Can be done by consideration of CX, use of Pythagoras.
METHOD 3
let the position of the car be at time be from O (A1)
M1
Note: For award A0M1 and follow through.
EITHER
attempt to differentiate implicitly with respect to M1
A1
attempt to substitute for into their differential equation M1
OR
M1
A1
at O, A1
THEN
A1
[6 marks]
Examiners report
Syllabus sections
-
22M.3.AHL.TZ2.1d.i:
Show that , for .
-
22M.2.AHL.TZ1.10e:
Find the rate of change of the height of the water when the container is filled to half its maximum volume.
-
18M.2.AHL.TZ2.H_11c:
Find the coordinates of the three points on C, nearest the origin, where the tangent is parallel to the line .
-
19N.2.AHL.TZ0.H_11a.i:
Using implicit differentiation, find an expression for .
-
19N.2.AHL.TZ0.H_11a.ii:
Find the equation of the tangent to the curve at the point .
-
18M.2.AHL.TZ2.H_11a:
Show that .
-
17M.2.AHL.TZ1.H_2a:
Find in terms of and .
-
22M.2.AHL.TZ1.10d:
Find the time it takes to fill the container to its maximum volume.
-
19M.1.AHL.TZ1.H_7:
Find the coordinates of the points on the curve at which .
-
EXN.2.AHL.TZ0.12c:
The curve has a point of inflexion at where . Determine the coordinates of this point of inflexion.
-
16N.1.AHL.TZ0.H_9b:
Find the equations of the tangents to this curve at the points where the curve intersects the line .
-
17M.2.AHL.TZ1.H_8b:
Calculate when .
-
17N.1.AHL.TZ0.H_7:
The folium of Descartes is a curve defined by the equation , shown in the following diagram.
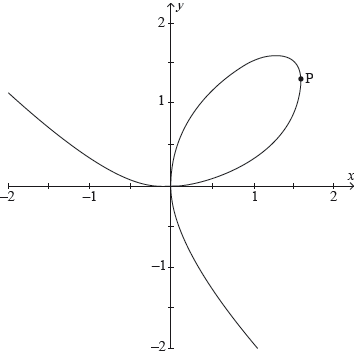
Determine the exact coordinates of the point P on the curve where the tangent line is parallel to the -axis.
-
20N.1.AHL.TZ0.H_11a:
Show that .
-
18N.1.AHL.TZ0.H_7b:
Let P(, ) be the unique point where the curves and intersect.
Show that the tangent to at P is perpendicular to the tangent to at P.
-
20N.1.AHL.TZ0.H_11b:
Prove that, when .
-
EXN.2.AHL.TZ0.6b:
The tangent to at the point Ρ is parallel to the -axis.
Find the -coordinate of Ρ.
-
21N.2.AHL.TZ0.8b:
Hence find the equation of the tangent to at the point where .
-
22M.3.AHL.TZ2.1f.i:
Find the equation of the tangent to at .
-
21N.3.AHL.TZ0.2b.ii:
By substituting , show that where is a constant.
-
21N.3.AHL.TZ0.2c.iii:
Let the two values found in part (c)(ii) be and .
Verify that is a solution to the differential equation in (c)(i),where is a constant.
-
17M.2.AHL.TZ1.H_8a:
Find an expression for the volume of water in the trough in terms of .
-
17M.2.AHL.TZ1.H_2b:
Determine the equation of the tangent to at the point
-
16N.1.AHL.TZ0.H_9a:
Find an expression for in terms of and .
-
20N.1.AHL.TZ0.H_11c:
Hence find the coordinates of all points on , for , where .
-
18M.2.AHL.TZ2.H_11b.i:
Find the coordinates of P and Q.
-
18N.1.AHL.TZ0.H_7a:
Using implicit differentiation, or otherwise, find for each curve in terms of and .
-
18M.2.AHL.TZ2.H_11b.ii:
Given that the gradients of the tangents to C at P and Q are m1 and m2 respectively, show that m1 × m2 = 1.
-
EXN.2.AHL.TZ0.6a:
Show that .
-
EXN.2.AHL.TZ0.12d:
Use the differential equation to show that the points of zero gradient on the curve lie on two straight lines of the form where the values of are to be determined.
-
21M.2.AHL.TZ1.9b:
At time , the following conditions are true.
Boat has travelled metres further than boat .
Boat is travelling at double the speed of boat .
The rate of change of the angle is radians per second.Find the speed of boat at time .
-
21N.2.AHL.TZ0.8a:
Show that .
-
21N.3.AHL.TZ0.2a.i:
By solving the differential equation , show that where is a constant.
-
21N.3.AHL.TZ0.2a.ii:
Show that .
-
21N.3.AHL.TZ0.2a.iii:
Solve the differential equation in part (a)(ii) to find as a function of .
-
21N.3.AHL.TZ0.2b.i:
By differentiating with respect to , show that .
-
21N.3.AHL.TZ0.2b.iii:
Hence find as a function of .
-
21N.3.AHL.TZ0.2b.iv:
Hence show that , where is a constant.
-
21N.3.AHL.TZ0.2c.i:
Show that .
-
21N.3.AHL.TZ0.2c.ii:
Find the two values for that satisfy .