
 Using a similar process of rearranging and substitution to the suvat equations of linear motion, we can derive equations for rotational motion.
Using a similar process of rearranging and substitution to the suvat equations of linear motion, we can derive equations for rotational motion.
Key Concepts
| Translational | Rotational |
|---|---|
| \(v=u+at\) | \(\omega_f=\omega_i+\alpha t\) |
| \(s={(u+v)\over 2} t\) | \(\theta = {(\omega_i+\omega_f)\over 2} t\) |
| \(s=ut+{1\over 2}at^2\) | \(\theta=\omega_i t+{1\over 2}\alpha t^2\) |
| \(v^2=u^2+2as\) | \({\omega_f}^2={\omega_i}^2+2\alpha \theta\) |
- \(\theta\) is angular displacement (rad)
- \(\omega_i\) is initial angular velocity (rads-1)
- \(\omega_f\) is final angular velocity (rads-1)
- \(\alpha\) is angular acceleration (rads-2)
- \(t\) is the time taken (s)
These equations apply if angular acceleration is constant.
 We can also display these quantities on rotational motion graphs.
We can also display these quantities on rotational motion graphs.
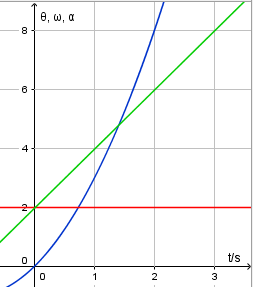
In this example:
- the blue line with increasing gradient represents the angular displacement the gradient of this graph is the angular velocity, which is shown as the green line increasing linearly with time
- the angular accleration is constant with zero gradient (red line)
Just as is the case with Newton's second law for forces and motion, an object experiences angular acceleration if it is not in rotational equilibrium.
By substition into Newton's second law, \(F=ma\):
\(\Gamma=I\alpha\)
- \(\Gamma\) is resultant torque (Nm)
- \(I\) is moment of inertia (kgm2)
- \(\alpha\) is angular acceleration (rads-2)
It is important to consider how you might increase angular acceleration. In simple terms, \(\alpha = {\Gamma \over I}\), so angular acceleration increases with torque and decreases with moment of inertia.
A closer examination of the situation below reveals that \(\alpha={Mgr\over Mr^2}={g\over r}\), so only the perpendicular distance has an effect.
.png)
A graph of torque vs time would be proportional in shape to the equivalent angular acceleration graph.
Use flashcards to practise your recall.
Use quizzes to practise application of theory.
START QUIZ!
An unbalanced torque accelerates a disc from rest to a rotational speed of 1 revolution per second in 1 second.
To calculate the angular acceleration I would use:
\(ω_i = 0\) rads-1
\(ω_f = 2π\) rads-1
\(t = 1\) s
\(α =\) unknown
An unbalanced torque accelerates a disc at \(2π\) rads-2 from rest to an angular velocity of \(π\) rads-1 .
To calculate the time taken I would use:
\(ω_i = 0\) rads-1
\(ω_f = π\) rads-1
\(α = 2π\) rads-1
\(t =\) unknown
An unbalanced torque accelerates a disc for 1 revolution from rest to a rotational speed of 1 revolution per second.
To calculate the angular acceleration I would use:
\(ω_i = 0 \) rads-1
\(ω_f = 2π \) rads-1
\(θ = 2π\) rad
\(α =\) unknown
An unbalanced torque accelerates a disc from rest to a rotational speed of 1 revolution per second in 1 revolution.
To calculate the time taken I would use:
\(ω_i = 0\) rads-1
\(ω_f = 2π\) rads-1
\(θ = 2π \) rad
\(t = \) unknown
An unbalanced torque accelerates a disc from rest at \(\pi\) rads-2 for 1 s.
To calculate the number of rotations I would use:
\(ω_i = 0\) rads-1
\(α = π\) rads-2
\(t = 1\) s
\(θ =\) unknown
The animation shows part of the motion of a disc accelerated by a constant torque.
To calculate the final angular velocity I would use:
\(ω_i = 0\) rads-1
\(ω_ f =\) unknown
\(θ = 2π\) rad
\(t = 2\) s
The diagram represents a mass attached to a light rod pivoted at O.
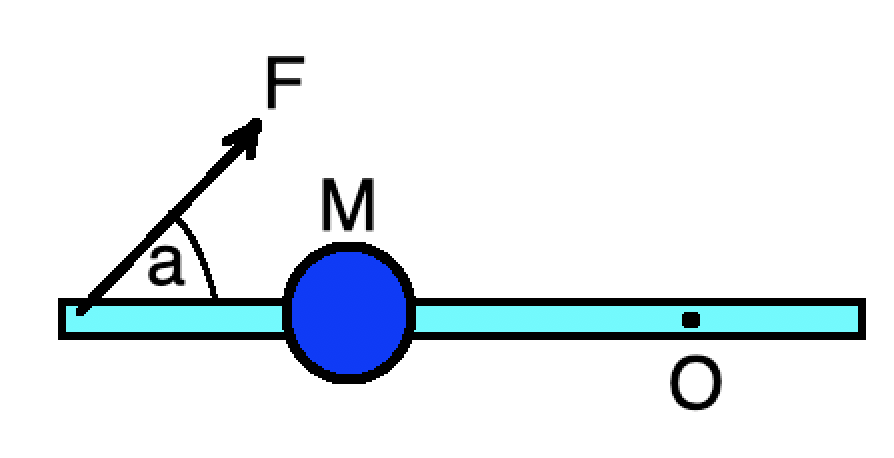
The angular acceleration would not be increased by:
Increasing \(M\) increases the moment of inertia, which decreases angular acceleration for the same torque.
NOTE: Moving O to the left would reduce moment of inertia but has the additional effect of reducing torque. Since \(I\propto r^2\) and \(\Gamma \propto r\), overall this would still increase angular acceleration.
The diagram represents a force acting on a rod of mass \(M\) pivoted at A.
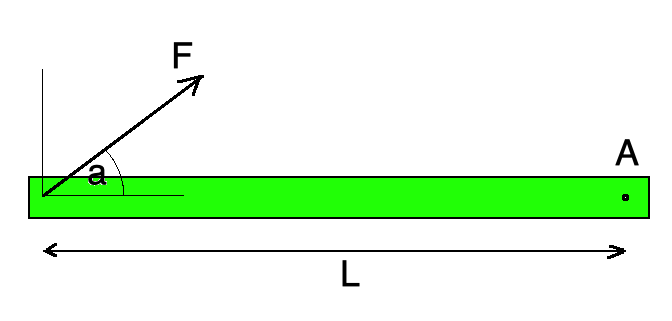
The angular acceleration of this rod is \(3F\sin a \over ML\)
The moment of inertia of the rod is:
\(I={T\over \alpha} = F\sin a L \times {ML\over 3F\sin a }\)
A force of 2 N is applied tangentially to the rim of a 0.5 m radius wheel with mass 4 kg.
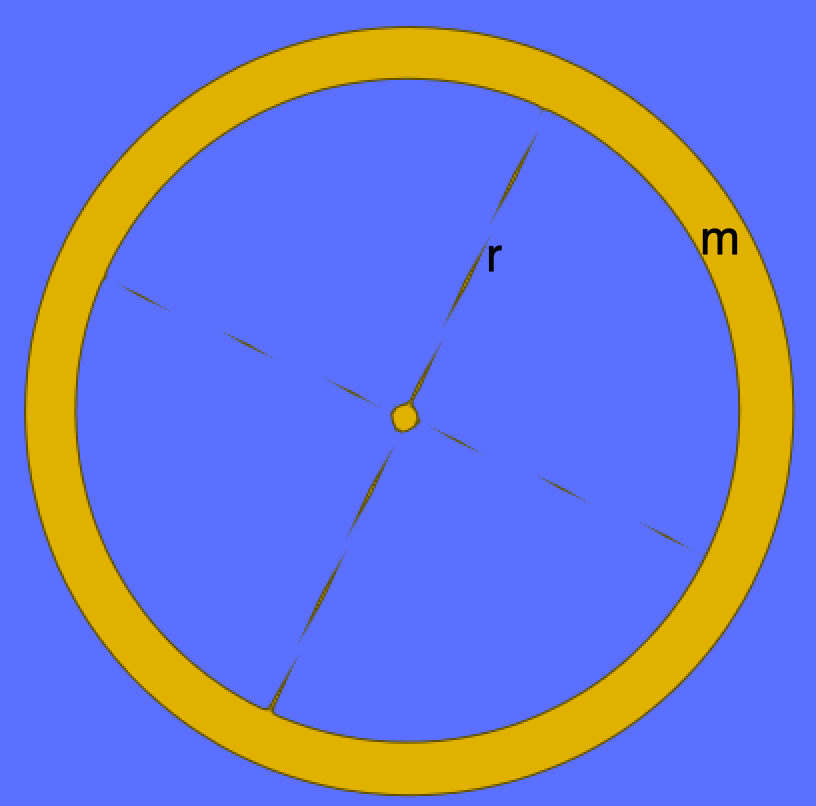
The angular acceleration of the wheel is
\(α = {\Gamma\over I} = 2 \times 0.5 \div (4\times 0.5^2)\)
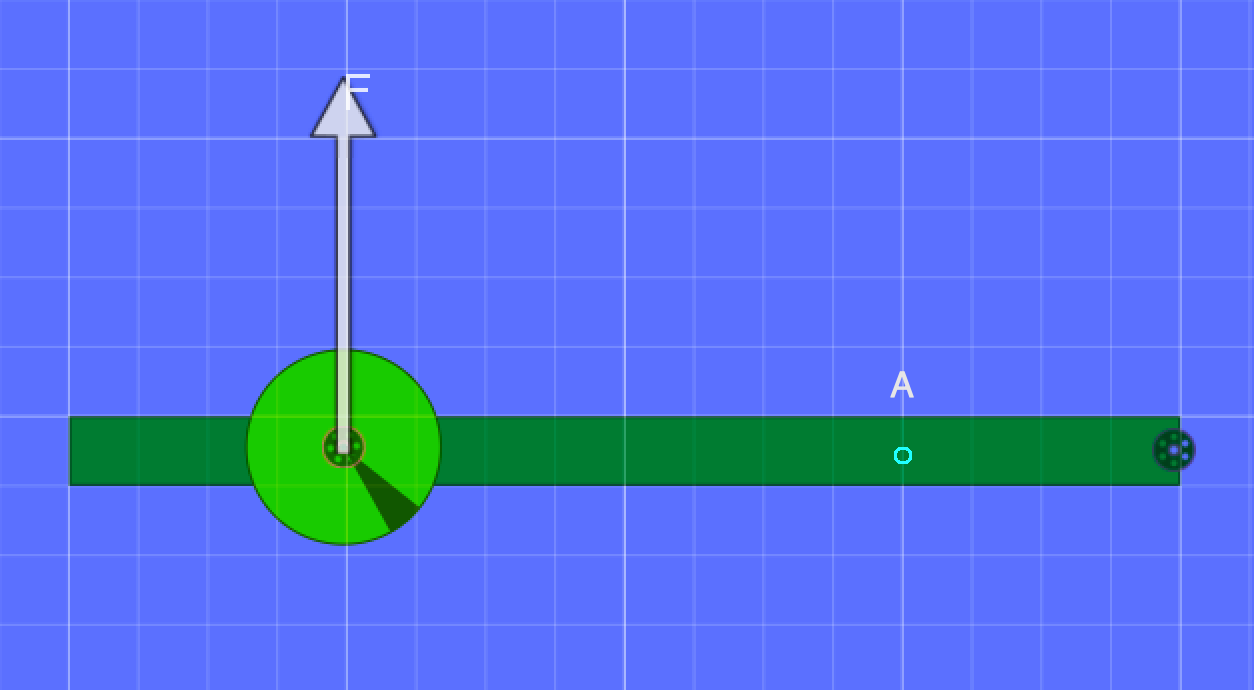
A force acts as shown on a light rod, with attached mass, pivoted at the end. The angular acceleration is \(\alpha\).
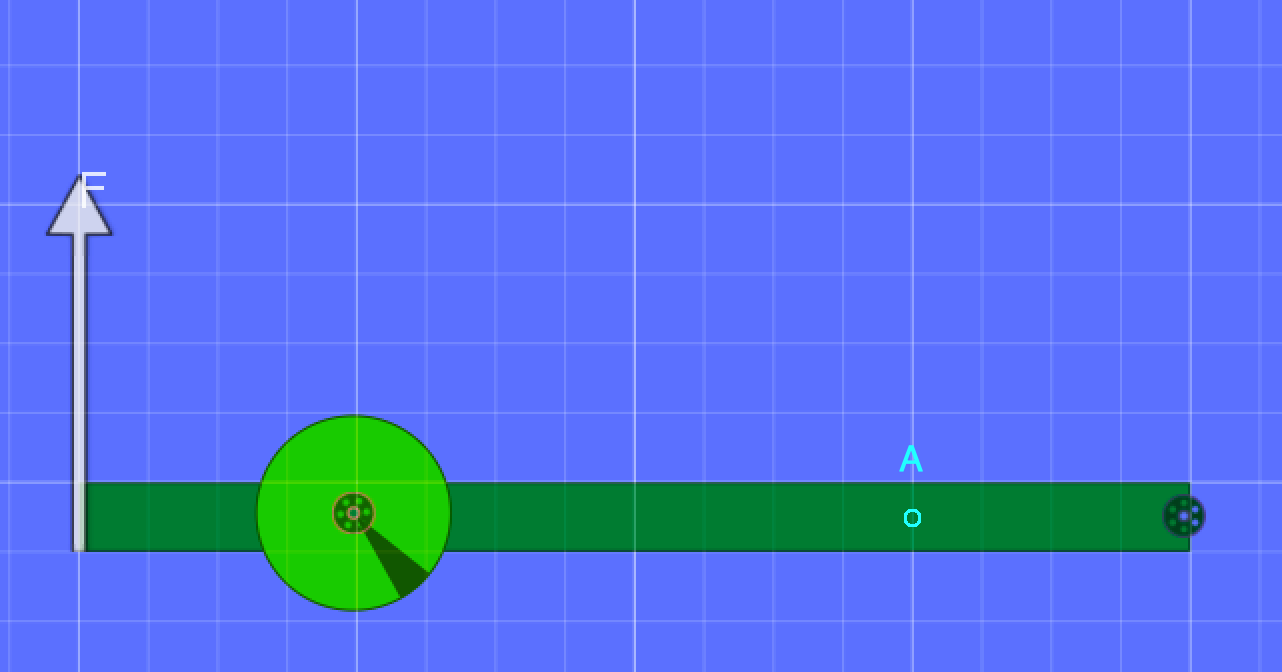
If the mass is moved to position A the angular acceleration will be
Torque is constant so \(α \propto {1\over I}\)
\(m\) is constant so \(α\propto {1\over r^2}\)
New \(r\) is one third of original so new \(\alpha\) is one ninth of original.
A force acts as shown on a light rod, with attached mass, pivoted at the end. The angular acceleration is \(α\).
If the pivot is moved to position A the angular acceleration will be
\(α = {\Gamma\over I} = {FL \over m{({3\over 4}L)^2}}={16\over 9}{F\over mL}\)
\(\alpha_\text{new}={F\times {3\over 4}L\over m({1\over 2}L)^2}=3{F\over mL}\)
\({{\alpha_\text{new}}\over {\alpha}}=3\div {16\over 9}={3\times 9\over 16}\)
A force acts as shown on a light rod, with attached mass, pivoted at the end. The angular acceleration is \(α\).
If the pivot is moved to position A the angular acceleration will be
Ignoring the rod that extends beyond the force:
\(α = {FL\over mL^2} = {F\over mL}\)
\(α_\text{new} = {F({2\over 3}L)\over m({2\over 3}L)^2}= {3\over 2}{F\over mL}\)
\({α_\text{new} \over α} = {3\over 2}\)
How much of Rotational dynamics have you understood?
 Twitter
Twitter  Facebook
Facebook  LinkedIn
LinkedIn