
 Torque, also known as the moment of a force, is defined as the product of a force and the perpendicular distance from the line of action to the pivot.
Torque, also known as the moment of a force, is defined as the product of a force and the perpendicular distance from the line of action to the pivot.
Key Concepts
Torque is the rotational equivalent of force.
What if the force isn't perpendicular to th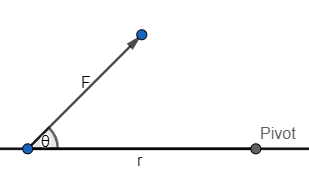 e beam?
e beam?
\(\Gamma=Fr\sin \theta\)
- \(\Gamma\) is torque (Nm)
- \(F\) is the force acting (N)
- \(r\) is the distance between the line of action of the force and the pivot
- \(\theta\) is the angle between the force direction and the beam
A couple is a body with two equal and opposite forces acting on it, at opposite ends. These forces combine to increase the torque on the body.
couple is a body with two equal and opposite forces acting on it, at opposite ends. These forces combine to increase the torque on the body.
In this case, the total torque acting is:
\(\Gamma=Fr\sin 90+Fr\sin 90\)
\(\Gamma=2Fr\)
 Watch the effect of a couple on a rod.
Watch the effect of a couple on a rod.
Moment of inertia is the rotational equivalent of mass. The moment of inertia of a rigid body is defined as the sum of the products of the mass and the squares of their distance from the pivot of all the particles in the body.
\(I=\sum mr^2\)
- \(I\) is moment of intertia (kgm2)
- \(m\) is the mass of a discrete section of the body (kg)
- \(r\) is the distance between the centre of mass of the discrete section and the pivot (m)
The moment of inertia of some bodies is easy to calculate. You will have to do this for yourself in the exam.
For 3 point masses orbitting a common pivot on massless rods, the moment of inertia is the sum of the moment of inertia of the objects: \(I =M_1{r_1}^2+M_2{r_2}^2+M_3{r_3}^2\)

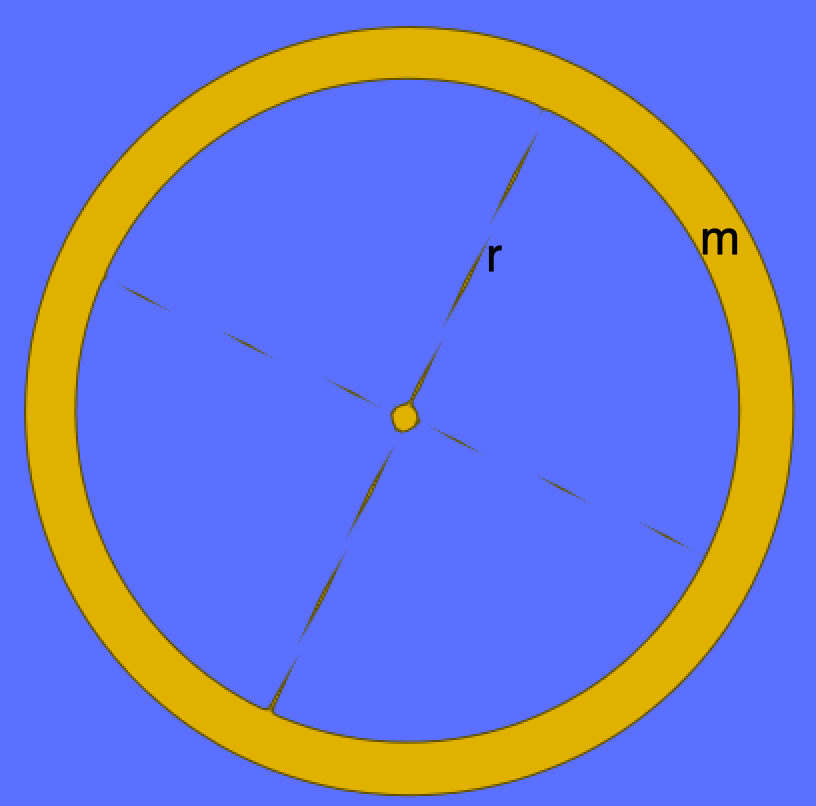
For a loop rotating around its centre, all particles can be assumed to be a constant distance from the pivot and so the total mass is at the radius: \(I =mr^2\)
The moment of inertia of more complex 3-dimensional shapes is harder to calculate and involves challenging integration from first principles. You will be given the equation for the moment of inertia in the exam. Note that there may be several different moment of intertia values for the same object, depending on the location of the pivot.
Use flashcards to practise your recall.
Use quizzes to practise application of theory.
START QUIZ!
The moment of inertia of a disc is equal to \({1\over 2} MR^2\). Which of the following discs, when rotated about the centre, has the largest moment of inertia?

A: \(I={1\over 2}MR^2\)
B: \(I={1\over 2}M({3R\over 4})^2={9\over 32}MR^2\)
C: \(I={1\over 2}({M\over 2})({3R\over 2})^2={9\over 16}MR^2\)
D: \(I={1\over 2}{M\over 3}({4R\over 3})^2={4\over 54}MR^2\)
A ship captain exerts equal and opposite forces of 5 N on the outermost points of her 1.5 m helm (steering wheel). What is the resultant torque of this couple?

The resultant torque is the sum of each clockwise moment = \(2 \times 5 \text{ N}\times0.75\text{ m}=7.5\text { Nm}\)
A ladder length 3 m and mass 45 kg rests against a wall at an angle of 40° to the horizontal. Calculate the clockwise moment of the ladder's weight about the point where ladder touches the ground.

The line of action of the weight is vertical. The perpendicular distance of this vertical line to the pivot is \(1.5\cos40\). The moment \(=45\times 10 \times 1.5\cos40=520 \text{ Nm}\).
The diagram shows two forces acting on a bar.

The sum of the torques about C is
Torque = force x perpendicular distance to pivot. Notice that \(F_1\) produces a clockwise torque and \(F_2\) produces an anticlockwise torque. Another correct answer would have been:
\(F_1(a+b+c)-F_2c\)
HINT: When looking for the distance between the pivot and \(F_1\), try blocking out \(F_2\) mentally (or with your finger) to ensure that you use the total distance.
The diagram shows two forces acting on a bar.
The sum of the torques about A is
Torque = force x perpendicular distance to pivot. There is no force acting beyond point B, so we can ignore distance \(c\). Both torques act in a clockwise direction around A.
A force acts on a bar as shown.
The torque about A is
The component of \(F\) perpendicular to the bar is \(F\sin a\).
The diagram shows two forces acting on a bar.
If \(F_1= F_2\) the torques would be balanced about point
A trick question - but for good reason! Translationally, the bar would be in linear equilibrium because of equal and opposite forces (remember Mechanics!). Rotationally, there is no position about which these torques would balance unless we could change one of their directions or magnitudes.
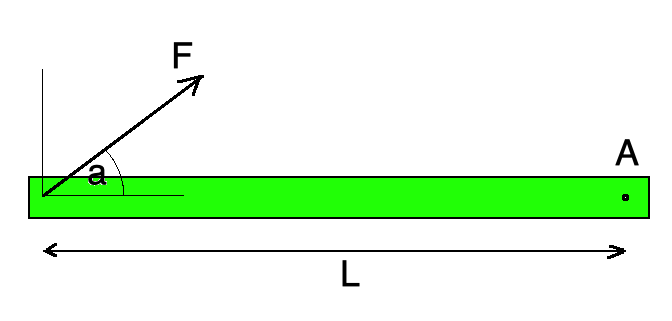
A force \(F\) acts on a rod of length \(L\).

The torque about A is
If \(\theta\) is the angle between the force and rod, then \(\Gamma = FL \sin{\theta}\)
\(\sinθ = {3\over 5}\) (it's a \(345\) triangle, so this question can be answered without a calculator)
Four identical small masses are attached to two massless rods as shown.

The ratio of moment of inertia about axis f to moment of inertia about axis g is
Since the masses are small, we can ignore the moment of inertia of the masses on the axis.
The masses are the same so \(I\) is proportional to \(r^2\). About axis f, the distance to the masses is half that about axis g, so the moment of inertia is one quarter.
Four identical small masses are attached to two massless rods as shown.

If the moment of inertia about axis f is \(2mr^2\), the moment of inertia about axis h is
Since the masses are small, we can ignore the moment of inertia of the masses on the axis.
If \(I_f = 2mr^2\) then the mass of blue dots \(=m\) and side of square \(= r\) \(\Rightarrow I_h = 2mr^2 + 2m(2r)^2\).
Alternatively, recall the previous response: \(I_h=I_g+I_f=4I_f+I_f\)
How much of Torque and moment of inertia have you understood?
 Twitter
Twitter  Facebook
Facebook  LinkedIn
LinkedIn