
 An oscillation is a movement through a full cycle.
An oscillation is a movement through a full cycle.
One example would be from a central equilibrium position to a maximum positive displacement, back through the equilibrium to a maximum negative displacement and back to the equilibrium position once more.
Another would be from either maximum displacement to the other and back again.
There are many oscillating systems that we could investigate, but we will start with the simple pendulum.
Key Concepts
A real pendulum can twist and turn, and swing in circles with large angles. The string can even bend if the bob is dropped in a particular way.
To simplify things in physics, we make some assumptions:
- the mass is very small (ideally a point)
- the string is inelastic (doesn’t stretch)
- the swings are small (< 10°)
The downside of these assumptions is that a real pendulum will not necessarily behave as predicted, but it is quite easy to make your mass on a string at least resemble these.
An oscillation could consist of one complete swing from A – B – A:

Amplitude (xo): A and B are positions of amplitude, where amplitude refers to the maximum displacement within a given swing. Amplitude is measured in m.
NB: From Kinematics that displacement (x) is the linear distance travelled from a starting location
Equilibrium position: The position where the pendulum bob would come to rest.
Time period (T): The time for one cycle (measured in s).
Frequency (f): The number of cycles per second (measured in Hz, which is equivalent to s-1)
\(f={1\over T}\)
When bodies oscillate in time with each other they are said to be in phase - they need not have the same amplitude or dimensions.
A full cycle can be described mathematically as 2π radians.
Phase difference (or phase angle), φ, is the angular shift in the displacement between two oscillations:
- y1 = r sin(ωt)
- y2 = r sin(ωt + φ)

If the phase difference, φ = π, the systems are described as being in antiphase. If the phase difference is 0 or 2π (etc!), the systems are in phase. Anything in between is out of phase.
 It is possible to calculate the time period for oscillations of a pendulum and spring. This is only required at Higher Level. Click to reveal.
It is possible to calculate the time period for oscillations of a pendulum and spring. This is only required at Higher Level. Click to reveal.


The equation for the variation of displacement with time is as follows:
\(x=x_0 \sin (2\pi ft)\)
or...
\(x=x_0 \cos (2\pi ft)\)
 Since sine and cosine graphs are translations of the other, the decision of which equation to use from above will be based on the starting point of the motion. 'cos' is the most common, as a pendulum is usually started from its amplitude.
Since sine and cosine graphs are translations of the other, the decision of which equation to use from above will be based on the starting point of the motion. 'cos' is the most common, as a pendulum is usually started from its amplitude.
There are several equations for use in simple harmonic oscillations, all of which are available in your Data Booklet:
\(x=x_0\sin {\omega t}\)
\(v=\omega x_0 \cos {\omega t}\)
\(a=-\omega^2 x_0 \sin {\omega t}\)
\(v = \omega \sqrt{x_0^2-x^2} \)
\(a=-\omega ^2 x\)
- x (m) = displacement
- x0 (m) = amplitude
- ω (Hz) = angular frequency = 2πf
- t (s) = time
- a (ms-2) = acceleration
- v (ms-1) = velocity
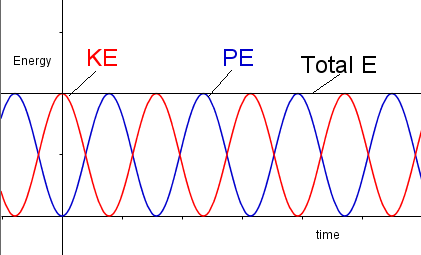
As a pendulum swings or mass bounces on a spring, there is a continual exchange of energy from potential to kinetic and back to potential. The total energy remains constant:
\(E_{total}=E_P+E_K\)
Kinetic energy varies with time as follows:
\(E_K={1\over 2}m\omega^2{x_0}^2\cos^2\omega t\)
Since energy is conserved, the PE at any time will be PEmax - KE:
\(E_P={1\over 2}m\omega^2{x_0}^2\sin^2\omega t\)
Maths dictates that \(\cos^2\alpha+\sin^2\alpha=1\) so the total energy simplifies to become:
\(E_{total}={1\over 2}m\omega^2{x_0}^2 \)
The total energy, kinetic energy and potential energy can be shown on a graph as follows:
How much of Oscillations have you understood?
 Twitter
Twitter  Facebook
Facebook  LinkedIn
LinkedIn